专心 创新 匠心


.jpg)
.jpg)


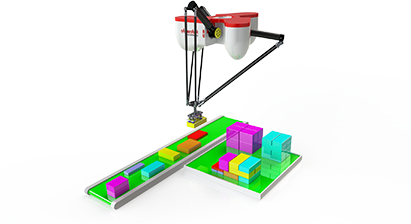

行业应用




服务体系
2小时响应,24小时抵达,72小时解决问题是我们始终坚持的售后服务追求



地址:天津滨海新区南海路156号泰达智能无人装备产业园29号
首席技术官联络邮箱: cto@tjchenxing.com
简历投递邮箱:cxhr@tjchenxing.com
商务合作邮箱:zhangxiaonan@tjchenxing.com